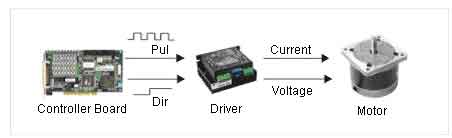
The stepper driver is one of the key
components in stepper system. As the diagram below,
based on the pulse / direction instruction (thin
current) from controller, the driver controls the
motor coil current (strong current), thereby to control
the rotation axis 's position and velocity. All of
the drivers in China Stepper Motor Inc. utilize the advanced bi-polar
constant current chopping mode to drive the stepper
motor.
Stepper Driver 's
Working Mode
There are three basic driving modes
for stepper motor: full step, half step & micro
step. They are differing in current control precision
in motor winding (i.e. excitation mode)
- Full Step Driving
During full step operation, both full/half stepper
and microstepping driver can be used for the
same stepper motor, but with different effect.
Based on the pulse/direction instruction, the
stepper driver excitated the two-phase stepper
motor 's two coils circularly (i.e. charging
the coils to set current), with this driving
mode, each pulse will make the motor run a
basic step angle, i.e. 1.8o (the standard 2
phase motor runs at 200 step angle per revolution).
- Half Step Driving
In uniphase excitation, the rotate shaft stop
in the full step position, when the driver
receive next pulse, the rotate axis will run
half step and stop in the middle of two full
step position on condition that excitated another
phase and keep it in excitation status one
by one. Keeping excitating the two-phase winding
with uniphase and biphase repeatedly, the stepper
motor will rotate at 0.90o per pulse in half
step mode. All of the China Stepper Motor Inc.TM full and half
step drivers can drive the motors with full
and half step mode, which is selected by one
of the driver 's switch-able switch. Compared
with full step, half step is superiority with
doubled precision and lower vibration during
low operation, herein between full and half
step mode, half step mode is usually preferable
in actual operation.
- Microstepping Driving
The microstepping drive has the advantage
of least vibration when running
at low speed & higher precision
when positioning. When the low
speed is needed (i.e. the rotate
shaft work at speed less than 60
rpm), or the position precision
is required to be less than 0.90
in stepping application, the microstepping
driver is used widely. The basic
principle is to control the motor
's two coils with precision current
by sine and cosine step separately,
thereby make one step angle divided
by several micro stepping. As the
diagram above, for instance 16
resolution step mode can make the
stepper motor with standard 200
step/rev. to achieve the running
precision at 200*16=3200 step/rev.
(i.e. 0.1125”). China Stepper Motor Inc.
can supply more than ten kinds
of microstepping drivers with complete
specification, superior performance,
reliable quality and competitive
price.

China Stepper Motor Inc.'s Advanced
Technology in Microstepping Drive
As one of the leading manufacturer
of stepper motors and drivers in China, China Stepper Motor Inc.
volume-produce the two-phase stepper driver with
high ratio of performance-to-price, which is suitable
for any 4, 6, and 8 leads homemade or imported
motor. Some of the drivers utilize the patented
technology from U.S. and the performance is highly
predominant. While most of the drivers is developed
by the Doctor & experts
in internal China Stepper Motor Inc. which have gained Chinese
patent and the ratio of performance-to-price is
much more attracted.
Selection Principle
- Driver 's current:
current is used to estimate
the driver 's capacity
and it is one of the most
important parameter to
select driver. Usually
the driver 's max. current
must be a little bit bigger
than the nominal current,
generally they are vary
from 2.0A, 3.5A, 6.0A,
8.0A and so on.
- Driver 's power
supply voltage:
the power supply voltage
is the criteria to estimate
the driver 's capability
of speed ascending. In general,
the supply voltage vary from
24VDC, 40VDC, 80VDC, 110VAC
and etc.
- Driver 's resolution:
Resolution is the key factor
to control precision, by
increasing resolution,
the precision can be improved.
Furthermore, higher resolution
can make the motor runs
more stably. Usually the
stepper motor vibrate at
low frequency, however
the vibration can be minimized
by increasing the resolution,
thereby make the motor
running smoothly.
Control Signal Interface Instruction
- Difference Interface:
Most China Stepper Motor Inc. drivers use
difference interface circuit,
set with photocoupler internally,
long winding drivers receiving
allowable, collector open
loop & PNP output circuit
signal, it is suitable
for any controller interface,
including Simens PLC. It
is recommended to use long
winding driver (e.g. AM26LS31)
circuit, which is advantaged
by anti interfere.
- Single / Double
Pulse Mode:
Most China Stepper Motor Inc. drivers can
receive two kinds of pulse
signal: one is pulse + direction
(single pulse); another is
positive pulse + negative
pulse (double pulse) mode,
it is selectable by the jump
machine in the driver.
|
|
|
|